



江苏句容梨多臂采摘机器人现场观摩与应用示范
智能装备助力果园高效采收,推动水果产业现代化转型
中国农业科学院某所在江苏省句容市后白镇长里岗召开了梨子多臂采摘机器人现场观摩会,展示了国内首台全天候多臂协同"采-收-运"一体式果园采摘机器人,针对梨子智能采收进行示范应用与推广,获得与会领导专家及果农的高度好评。

梨多臂采摘机器人整体外观(国内首台全天候多臂协同机型)

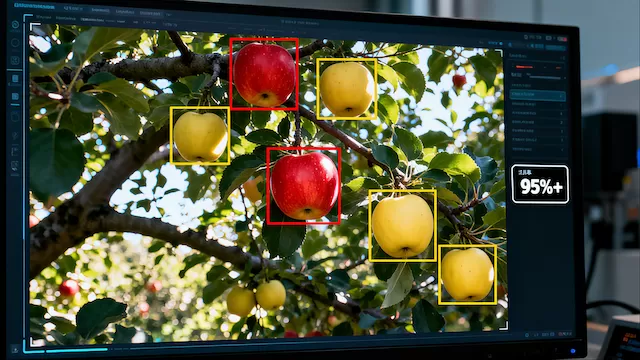
机器人采摘作业现场(精准识别与抓取)
现场观摩会场景(专家与果农观看演示)
该采摘机器人由中国农业科学院某所联合多家高科技公司共同研制,是针对水果产业劳动力不足、生产成本高、生产效率低等痛点问题开发的智能化解决方案。
这款国内首台全天候多臂协同"采-收-运"一体式果园采摘机器人,集成了机器视觉、智能控制、精密机械等多项先进技术,能够实现对梨子的自动识别、精准定位、柔性抓取和自动转运等一系列作业流程。
在江苏省句容市后白镇长里岗举办的现场观摩会上,该机器人进行了实地作业展示,其稳定的性能和高效的采摘能力得到了与会领导、专家学者及当地果农的一致认可,为水果产业智能化升级提供了有力支撑。
该梨多臂采摘机器人通过多项创新技术,为果园采收提供全方位智能化解决方案:
采用防水防尘设计和自适应光照系统,可在不同天气条件下稳定工作,突破传统采摘受天气影响的限制。
配备先进的SLAM导航技术和多传感器融合避障系统,可自主规划路径,灵活避开果园中的障碍物。
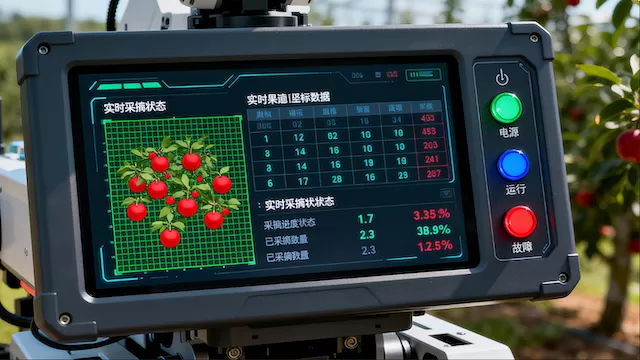
可连接云端平台,实时上传采摘数据,支持远程监控和管理,为果园生产决策提供数据支持。
江苏省镇江市句容市后白镇长里岗(江苏省重要的梨产业种植基地)
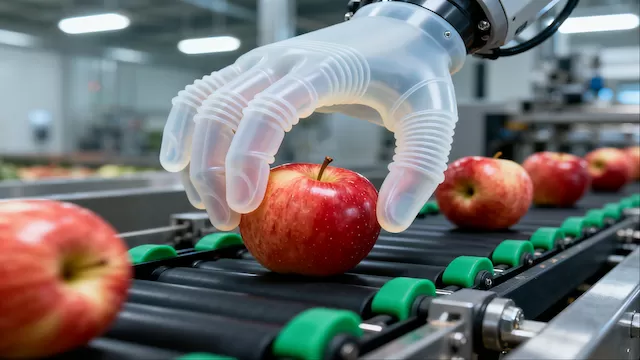
机器人能够在各种复杂环境下完成梨子的采摘作业,采摘质量和效率均达到或超过人工水平,有效解决了果园劳动力短缺问题。
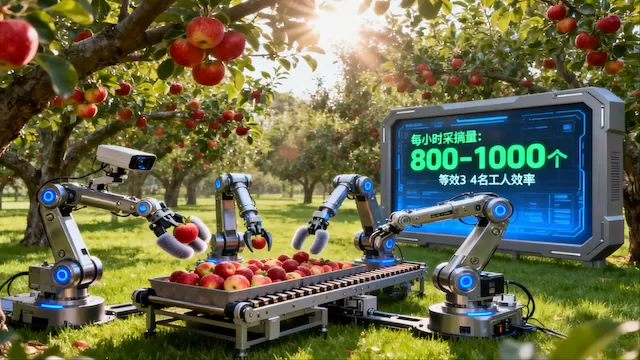
现场展示的机器人每小时可采摘800-1000个梨,较人工采摘效率提升3-4倍,为水果产业智能化、规模化发展提供了可行模式。
为果园采收环节提供了完整的技术解决方案,不仅降低了劳动强度和生产成本,还提高了采摘标准化水平,推动水果产业转型升级。



"这款梨多臂采摘机器人在识别精度和采摘效率上都达到了国内领先水平,特别是多臂协同作业技术解决了传统采摘机器人效率低的问题,为水果产业机械化采收提供了重要突破。"
"我们最缺的就是采摘工人,尤其是高峰期,雇人难、成本高。这个机器人如果能推广开来,对我们果农来说真是解决了大问题。看了演示,采摘的果子也没有损伤,比人工还细心。"
项目研发团队反馈:此次现场观摩会收集到的反馈非常宝贵,我们将根据专家和果农的建议进一步优化机器人性能,降低成本,提高适应性,争取早日实现产业化应用,为推动我国水果产业智能化发展贡献力量。
该梨多臂采摘机器人预计在2026年完成产业化测试,2027年进入市场推广阶段。未来将在以下方面深化发展:一是进一步降低设备成本,使其更适合中小农户使用;二是拓展应用范围,开发适用于苹果、柑橘、桃等多种水果的采摘机器人;三是构建"采摘-分级-包装"一体化智能生产线,全面提升水果产业智能化水平。
随着技术的不断成熟和成本的降低,预计未来5-10年内,智能采摘机器人将在我国主要水果产区得到广泛应用,大幅提升产业竞争力,推动农业现代化进程。
