





Observación en el sitio y demostración de aplicaciones del robot de recolección de dobby de pera en Jurong, Jiangsu
El equipo inteligente potencia la cosecha eficiente en huertos e impulsa la modernización de la industria frutícola
Un instituto de investigación de la Academia China de Ciencias Agrícolas celebró una reunión de observación de campo del robot multibrazo para recolección de peras en Changligang, ciudad de Houbai, ciudad de Jurong, provincia de Jiangsu. Se presentó el primer robot integrado «recolección-cosecha-transporte» para huertos, multibrazo y todo tiempo, demostrando y promoviendo la cosecha inteligente de peras. El evento recibió grandes elogios de los líderes asistentes, expertos y fruticultores.

Vista general del robot multibrazo para recolección de peras (primer modelo multibrazo todo tiempo de China)

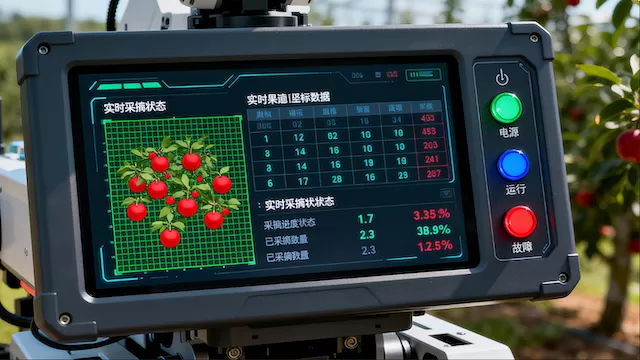
Lugar de operación de recolección del robot (identificación y agarre precisos)
Escena de la reunión de observación en campo (expertos y fruticultores viendo la demostración)
El robot recolector fue desarrollado conjuntamente por un instituto de investigación de la Academia China de Ciencias Agrícolas y varias empresas de alta tecnología. Es una solución inteligente desarrollada para abordar los problemas de la industria frutícola, como la escasez de mano de obra, los altos costos de producción y la baja eficiencia productiva.
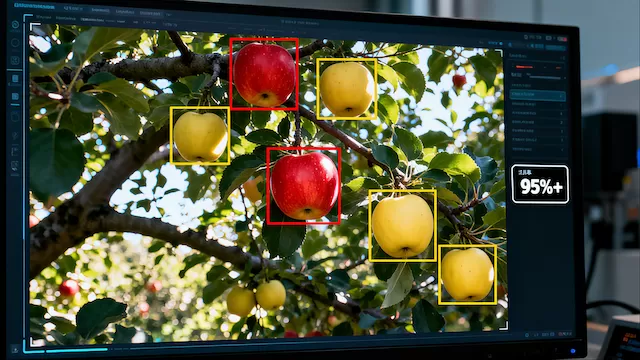
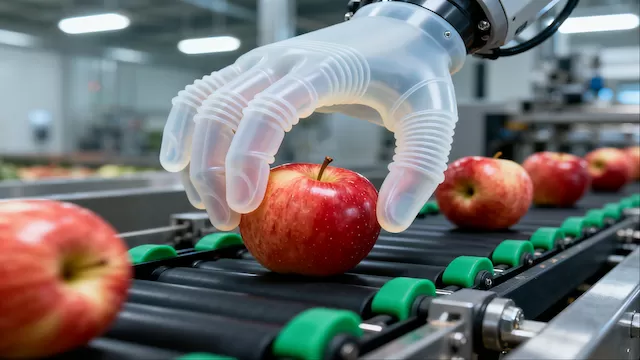
Este primer robot integrado «recolección-cosecha-transporte» para huertos, multibrazo y todo tiempo, integra múltiples tecnologías avanzadas como visión artificial, control inteligente y mecánica de precisión. Puede realizar una serie de procesos operativos que incluyen identificación automática, posicionamiento preciso, agarre flexible y transporte automático de peras.
En la reunión de observación en campo celebrada en Changligang, ciudad de Houbai, ciudad de Jurong, provincia de Jiangsu, el robot demostró operaciones in situ. Su rendimiento estable y su alta capacidad de recolección fueron reconocidos unánimemente por los líderes asistentes, expertos, académicos y fruticultores locales, proporcionando un fuerte apoyo para la modernización inteligente de la industria frutícola.
El robot multibrazo para recolección de peras proporciona una solución inteligente integral para la cosecha en huertos a través de múltiples tecnologías innovadoras:
Diseño resistente al agua y al polvo y sistema de iluminación adaptativa, puede trabajar de forma estable en diferentes condiciones climáticas, superando la limitación de la recolección tradicional afectada por el clima.
Equipado con tecnología avanzada de navegación SLAM y sistema de evasión de obstáculos con fusión multisensor, puede planificar rutas de forma autónoma y evitar obstáculos de manera flexible en el huerto.
Puede conectarse a la plataforma en la nube, cargar datos de recolección en tiempo real, soportar monitoreo y gestión remota, y proporcionar soporte de datos para las decisiones de producción en el huerto.
Changligang, ciudad de Houbai, ciudad de Jurong, ciudad de Zhenjiang, provincia de Jiangsu (importante base de cultivo de peras en la provincia de Jiangsu)
El robot puede realizar operaciones de recolección de peras en diversos entornos complejos. La calidad y eficiencia de recolección han alcanzado o superado los niveles manuales, resolviendo eficazmente el problema de escasez de mano de obra en los huertos.
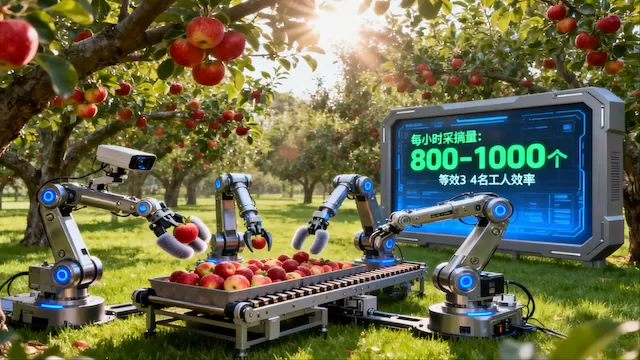
El robot presentado puede recolectar 800-1000 peras por hora, lo que es 3-4 veces más eficiente que la recolección manual, proporcionando un modelo factible para el desarrollo inteligente y a gran escala de la industria frutícola.
Proporciona una solución técnica completa para el proceso de cosecha en huertos, no solo reduciendo la intensidad laboral y los costos de producción, sino también mejorando el nivel de estandarización de la recolección, promoviendo la transformación y modernización de la industria frutícola.



«Este robot multibrazo para recolección de peras ha alcanzado el nivel líder nacional en cuanto a precisión de reconocimiento y eficiencia de recolección. Especialmente la tecnología de operación colaborativa multibrazo ha resuelto el problema de baja eficiencia de los robots recolectores tradicionales, proporcionando un avance importante para la cosecha mecanizada en la industria frutícola».
«Lo que más nos falta son recolectores, especialmente en temporada alta. Es difícil contratar gente y el costo es alto. Si este robot puede promoverse, realmente resolvería un gran problema para nosotros los fruticultores. Después de ver la demostración, las frutas recolectadas no están dañadas, es incluso más cuidadoso que el trabajo manual».
Comentario del equipo de I+D del proyecto: La retroalimentación recogida en esta reunión de observación en campo es muy valiosa. Optimizaremos aún más el rendimiento del robot, reduciremos costos y mejoraremos la adaptabilidad según las sugerencias de expertos y fruticultores, esforzándonos por lograr la aplicación industrial lo antes posible y contribuir a promover el desarrollo inteligente de la industria frutícola china.
Se espera que el robot multibrazo para recolección de peras complete las pruebas industriales en 2026 y entre en la fase de promoción en el mercado en 2027. El desarrollo futuro se profundizará en los siguientes aspectos: primero, reducir aún más los costos del equipo para que sea más adecuado para agricultores pequeños y medianos; segundo, ampliar el ámbito de aplicación y desarrollar robots recolectores adecuados para diversas frutas como manzanas, cítricos y melocotones; tercero, construir una línea de producción inteligente integrada de «recolección-clasificación-empaque» para mejorar integralmente el nivel de inteligencia de la industria frutícola.
Con la continua madurez de la tecnología y la reducción de costos, se espera que en los próximos 5-10 años los robots recolectores inteligentes se utilicen ampliamente en las principales regiones frutícolas de China, mejorando significativamente la competitividad de la industria y promoviendo el proceso de modernización agrícola.
