





Наблюдение на месте и демонстрация применения робота-сборщика груш добби в Джуроне, провинция Цзянсу
Интеллектуальное оборудование обеспечивает эффективный сбор урожая в садах и ведет модернизацию плодовой промышленности
Научно-исследовательский институт Китайской академии сельскохозяйственных наук провел в Чанлиган, город Хоубай, город Цзюйжун, провинция Цзянсу, полевую демонстрацию многорукого робота для сбора груш. Был представлен первый в Китае всепогодный многорукий интегрированный робот «сбор-уборка-транспортировка» для садов, демонстрирующий и продвигающий интеллектуальный сбор груш. Мероприятие получило высокую оценку от присутствующих руководителей, экспертов и садоводов.

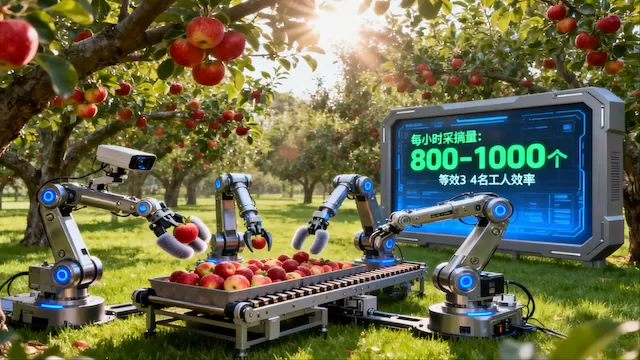
Общий вид многорукого робота для сбора груш (первая в Китае всепогодная многорукая модель)

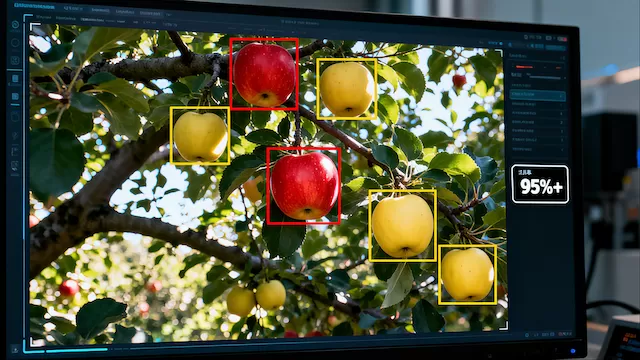
Место работы робота по сбору урожая (точное распознавание и захват)
Сцена полевого наблюдательного совещания (эксперты и садоводы наблюдают за демонстрацией)
Робот для сбора урожая был совместно разработан научно-исследовательским институтом Китайской академии сельскохозяйственных наук и несколькими высокотехнологичными компаниями. Это интеллектуальное решение создано для решения проблем плодовой промышленности, таких как нехватка рабочей силы, высокие производственные затраты и низкая эффективность производства.
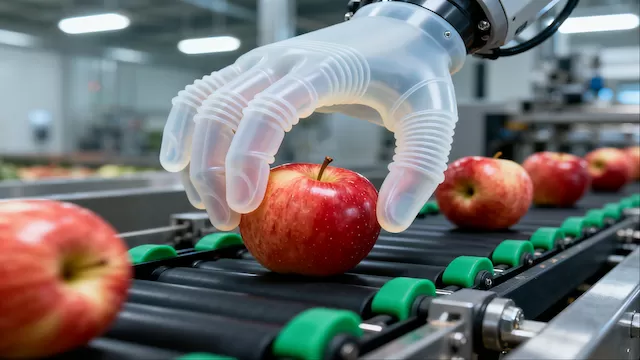
Этот первый в Китае всепогодный многорукий интегрированный робот «сбор-уборка-транспортировка» для садов объединяет множество передовых технологий, включая машинное зрение, интеллектуальное управление и точную механику. Он может выполнять ряд операционных процессов, включая автоматическое распознавание, точное позиционирование, гибкий захват и автоматическую транспортировку груш.
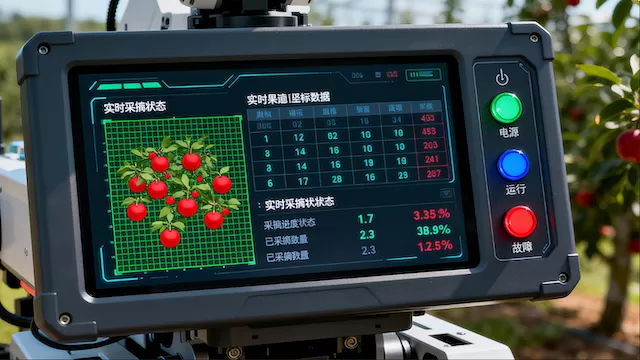
На полевом наблюдательном совещании, проведенном в Чанлиган, город Хоубай, город Цзюйжун, провинция Цзянсу, робот продемонстрировал работу на месте. Его стабильная производительность и высокая эффективность сбора были единодушно признаны присутствующими руководителями, экспертами, учеными и местными садоводами, что обеспечило мощную поддержку интеллектуальной модернизации плодовой промышленности.
Многорукий робот для сбора груш предоставляет комплексное интеллектуальное решение для сбора урожая в садах с помощью ряда инновационных технологий:
Влагозащищенная и пылезащищенная конструкция и адаптивная система освещения позволяют работать стабильно в различных погодных условиях, преодолевая ограничение традиционного сбора, зависящего от погоды.
Оснащен передовой технологией SLAM-навигации и системой обхода препятствий с мультисенсорной фузией, может автономно планировать маршруты и гибко объезжать препятствия в саду.
Может подключаться к облачной платформе, передавать данные о сборе в реальном времени, поддерживать удаленный мониторинг и управление, предоставляя поддержку данных для принятия решений по производству в саду.
Чанлиган, город Хоубай, город Цзюйжун, город Чжэньцзян, провинция Цзянсу (важная база выращивания груш в провинции Цзянсу)
Робот может выполнять операции по сбору груш в различных сложных условиях. Качество и эффективность сбора достигли или превысили ручной уровень, эффективно решая проблему нехватки рабочей силы в садах.
Представленный робот может собирать 800-1000 груш в час, что в 3-4 раза эффективнее ручного сбора, предоставляя возможную модель для интеллектуального и крупномасштабного развития плодовой промышленности.
Предоставляет полное техническое решение для процесса сбора урожая в садах, не только снижая трудоемкость и производственные затраты, но и повышая уровень стандартизации сбора, способствуя трансформации и модернизации плодовой промышленности.



«Этот многорукий робот для сбора груш достиг передового в стране уровня по точности распознавания и эффективности сбора. Особенно технология совместной работы нескольких манипуляторов решила проблему низкой эффективности традиционных уборочных роботов, предоставив важный прорыв для механизированного сбора урожая в плодовой промышленности».
«Больше всего нам не хватает сборщиков, особенно в пик сезона. Трудно нанять людей, да и стоимость высока. Если этот робот сможет распространиться, это действительно решит для нас, садоводов, большую проблему. После просмотра демонстрации — собранные плоды не повреждены, даже аккуратнее ручного труда».
Отзыв команды разработчиков проекта: Обратная связь, собранная на этом полевом наблюдательном совещании, очень ценна. Мы будем дальше оптимизировать производительность робота, снижать затраты и повышать адаптивность в соответствии с предложениями экспертов и садоводов, стремясь как можно скорее реализовать промышленное применение и внести вклад в продвижение интеллектуального развития плодовой промышленности Китая.
Ожидается, что многорукий робот для сбора груш завершит промышленное тестирование в 2026 году и выйдет на стадию рыночного продвижения в 2027 году. Дальнейшее развитие будет углубляться по следующим направлениям: во-первых, дальнейшее снижение стоимости оборудования, чтобы сделать его более подходящим для малых и средних фермеров; во-вторых, расширение области применения и разработка уборочных роботов для различных фруктов: яблок, цитрусовых, персиков; в-третьих, создание интегрированной интеллектуальной производственной линии «сбор-сортировка-упаковка» для всестороннего повышения уровня интеллектуализации плодовой промышленности.
С постоянным развитием технологий и снижением затрат ожидается, что в ближайшие 5-10 лет интеллектуальные уборочные роботы будут широко использоваться в основных плодовых регионах Китая, значительно повышая конкурентоспособность отрасли и способствуя процессу модернизации сельского хозяйства.
